import pyart
import matplotlib.pyplot as plt
import cartopy.crs as ccrsimport unravelradar = pyart.io.read("bnfcsapr2cfrS3.a1.20250520.233012.nc")vel_texture = pyart.retrieve.calculate_velocity_texture(radar,
vel_field='mean_doppler_velocity',
nyq=16.5)
radar.add_field('texture', vel_texture, replace_existing=True)
gatefilter = pyart.filters.GateFilter(radar)
#gatefitler = pyart.correct.despeckle_field(radar, "mean_doppler_velocity")
gatefilter.exclude_above('texture', 5)
gatefilter.gate_excludedarray([[ True, True, True, ..., True, True, True],
[False, True, False, ..., True, True, True],
[False, False, False, ..., True, True, True],
...,
[False, True, False, ..., True, True, True],
[False, False, False, ..., True, True, True],
[False, False, False, ..., True, True, True]],
shape=(5404, 1100))vel = unravel.unravel_3D_pyart(radar,
gatefilter=gatefilter,
velname="mean_doppler_velocity",
dbzname="reflectivity",
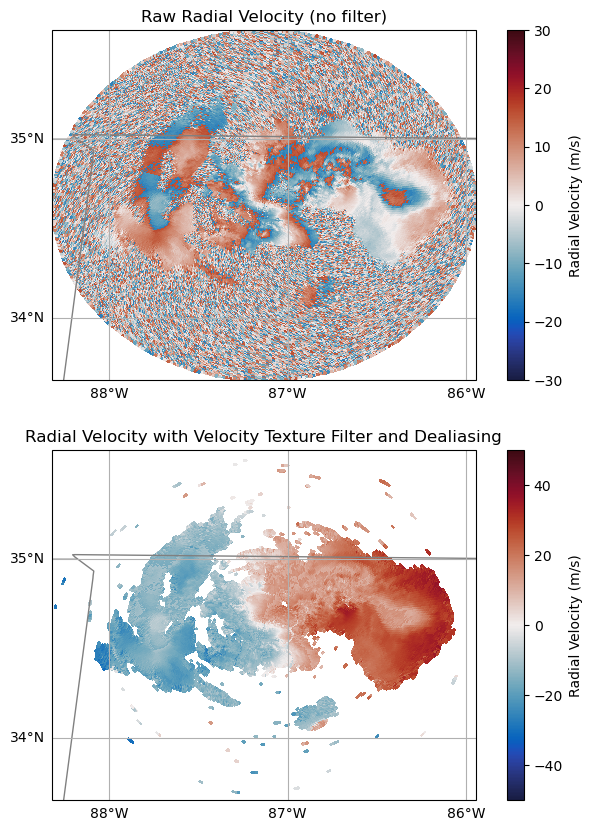
nyquist_velocity=13.3)radar.add_field_like("mean_doppler_velocity", "corrected_velocity", vel)# Plot our Unfiltered Data
fig = plt.figure(figsize=[8, 10])
ax = plt.subplot(211, projection=ccrs.PlateCarree())
display = pyart.graph.RadarMapDisplay(radar)
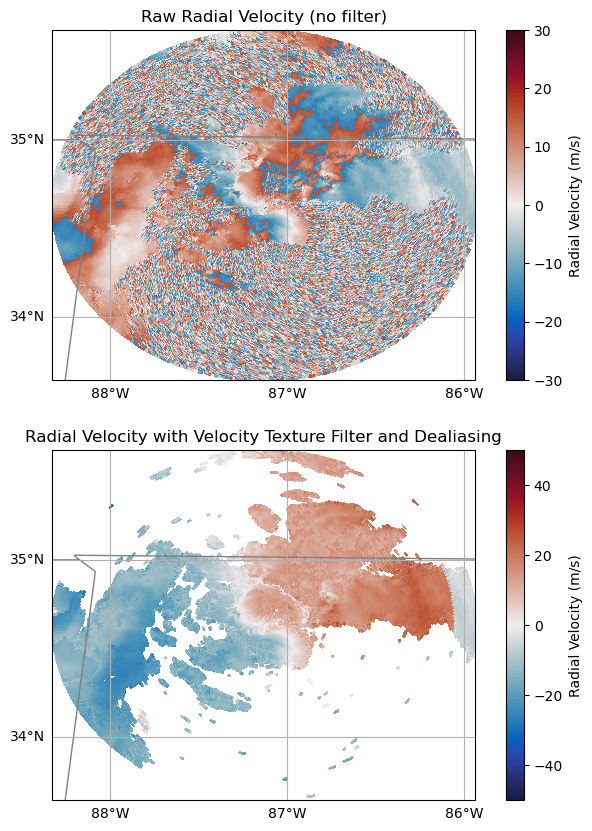
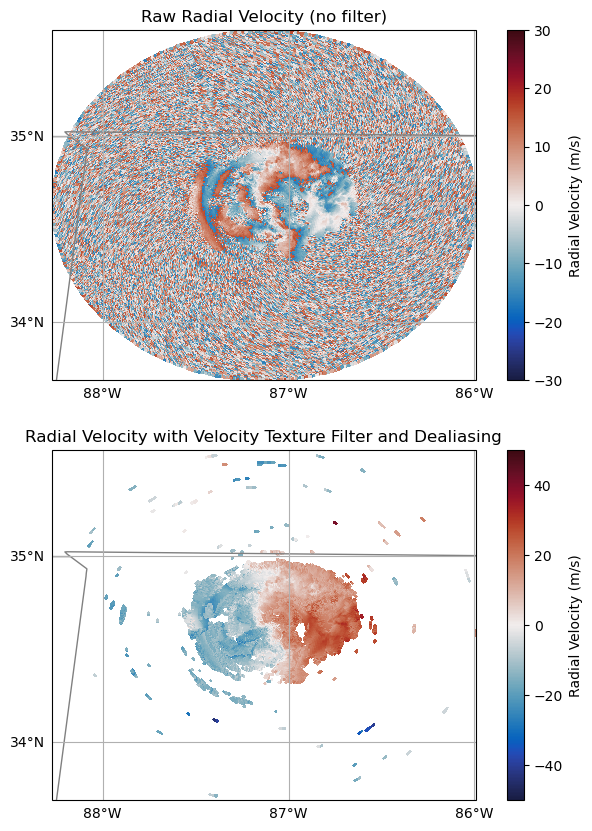
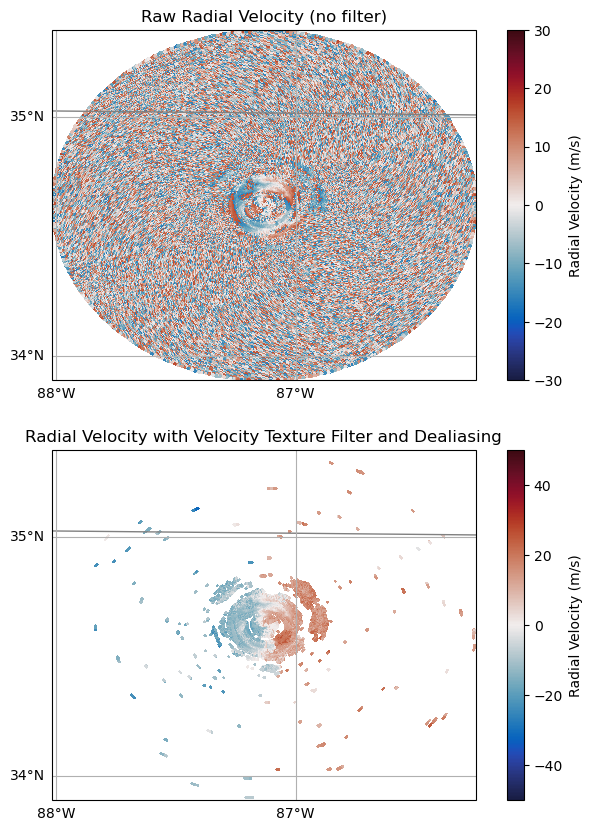
display.plot_ppi_map('mean_doppler_velocity',
title='Raw Radial Velocity (no filter)',
ax=ax,
sweep=0,
resolution='50m',
vmin=-30,
vmax=30,
projection=ccrs.PlateCarree(),
colorbar_label='Radial Velocity (m/s)',
cmap='balance')
ax2 = plt.subplot(2,1,2,projection=ccrs.PlateCarree())
# Plot our filtered, dealiased data
display = pyart.graph.RadarMapDisplay(radar)
display.plot_ppi_map('corrected_velocity',
title='Radial Velocity with Velocity Texture Filter and Dealiasing',
ax=ax2,
sweep=0,
resolution='50m',
vmin=-30,
vmax=30,
projection=ccrs.PlateCarree(),
gatefilter=gatefilter,
colorbar_label='Radial Velocity (m/s)',
cmap='balance')
plt.show()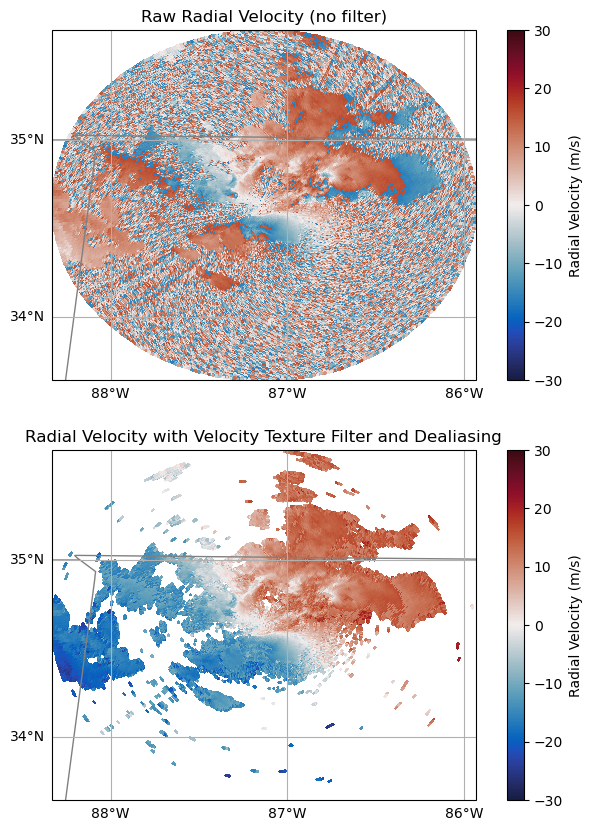
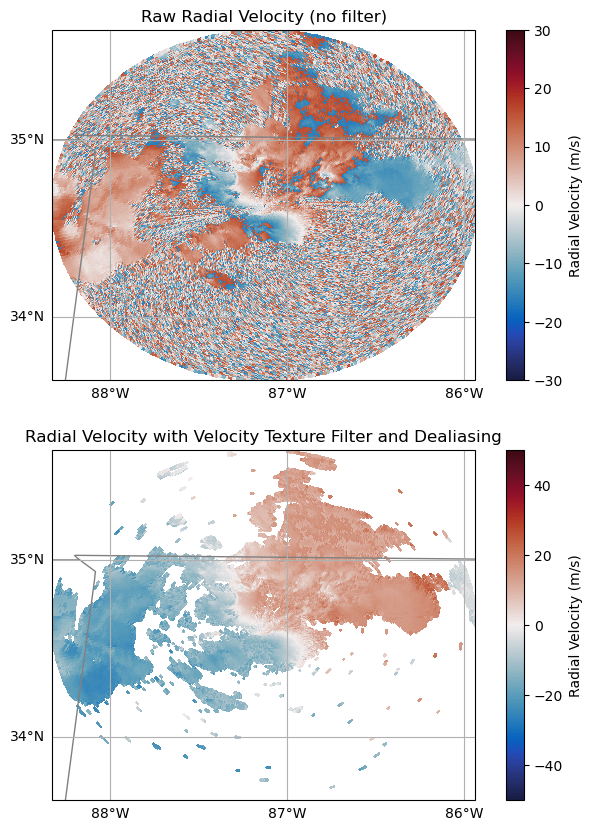
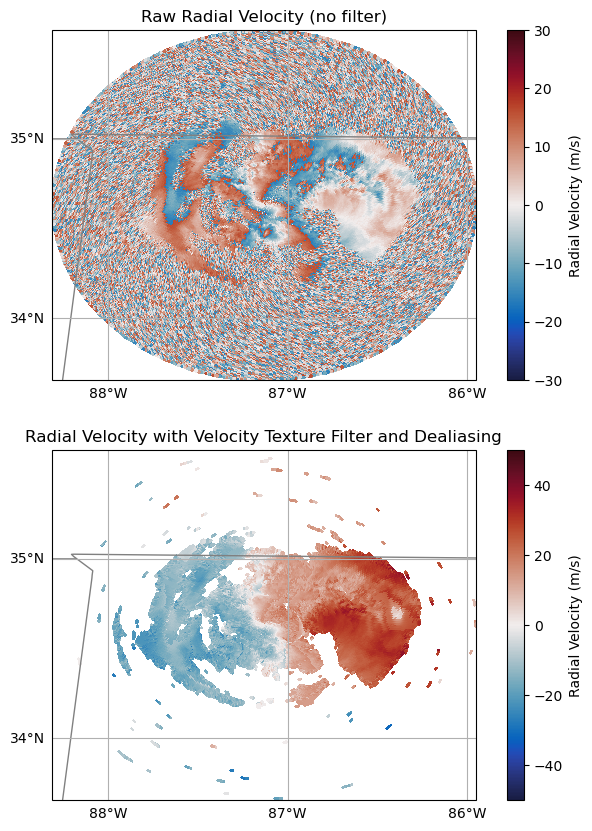
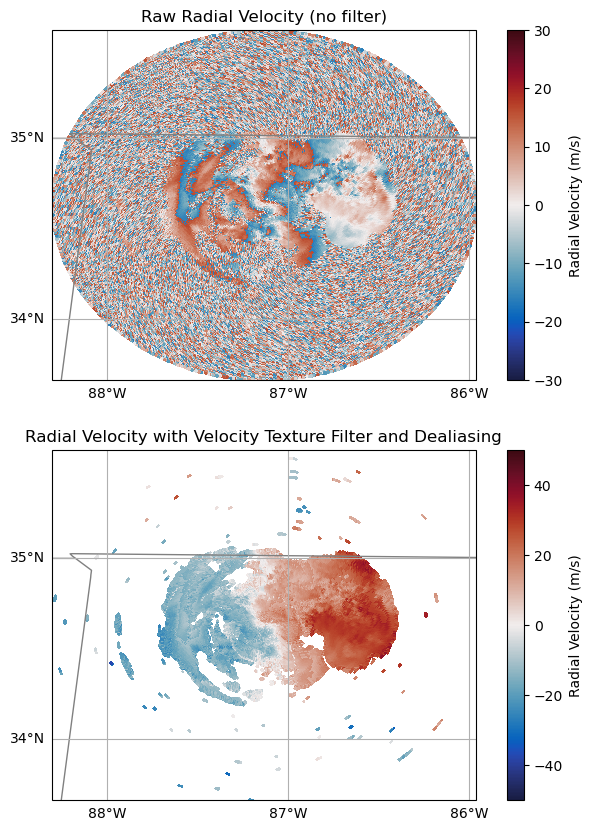
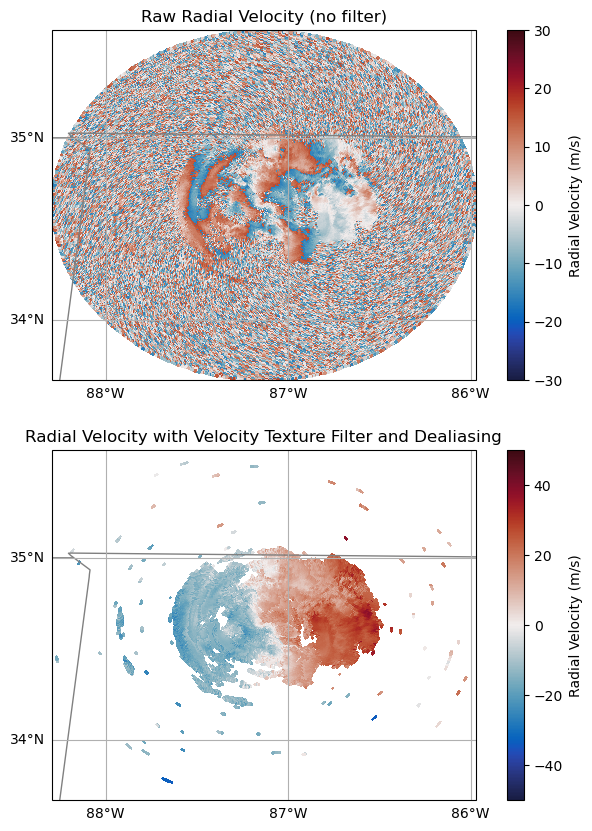
for sweep in range(0, radar.nsweeps):
# Plot our Unfiltered Data
fig = plt.figure(figsize=[8, 10])
ax = plt.subplot(211, projection=ccrs.PlateCarree())
display = pyart.graph.RadarMapDisplay(radar)
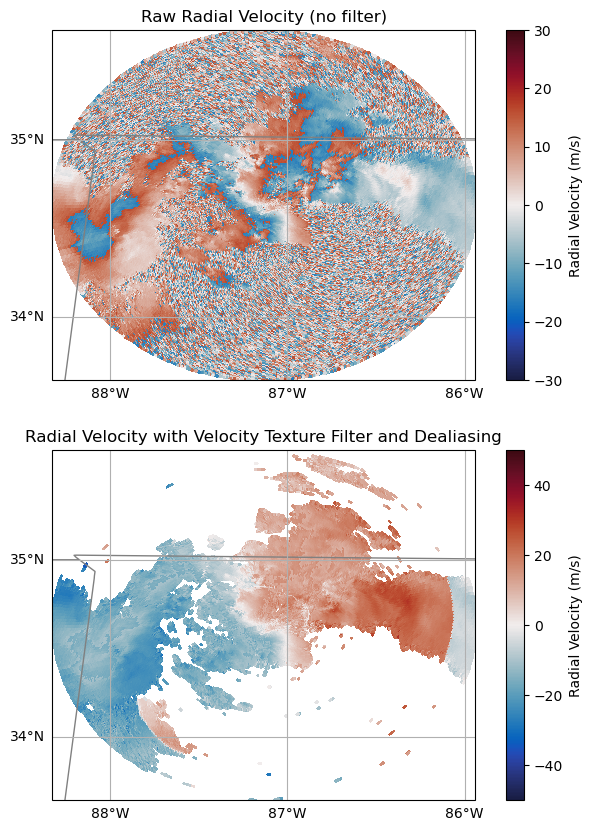
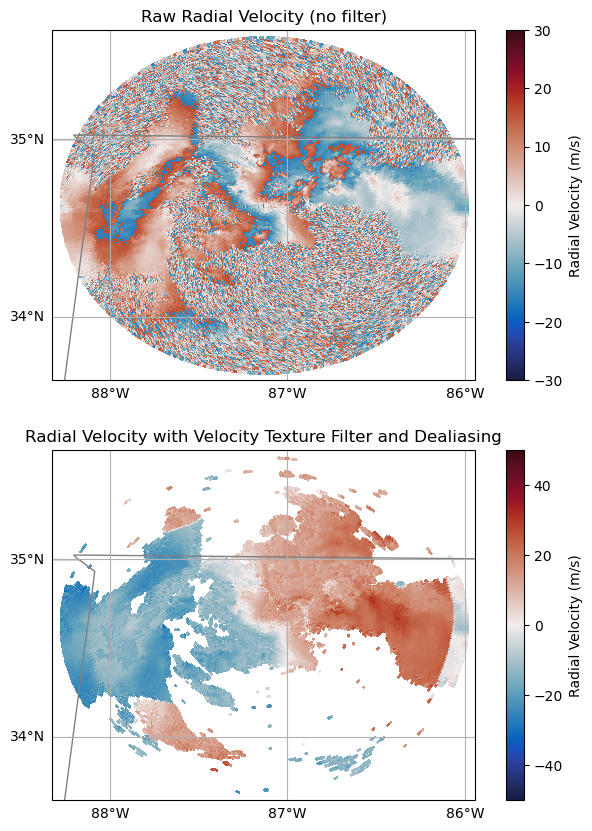
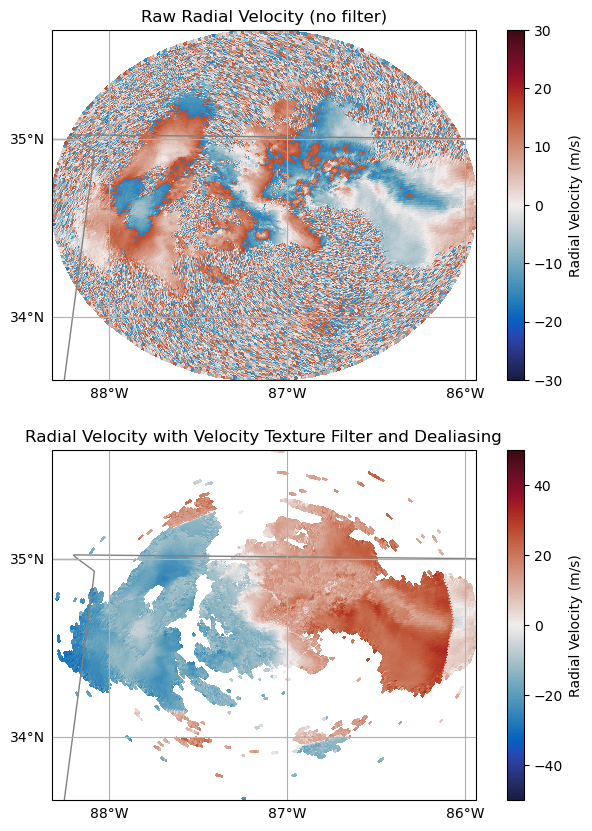
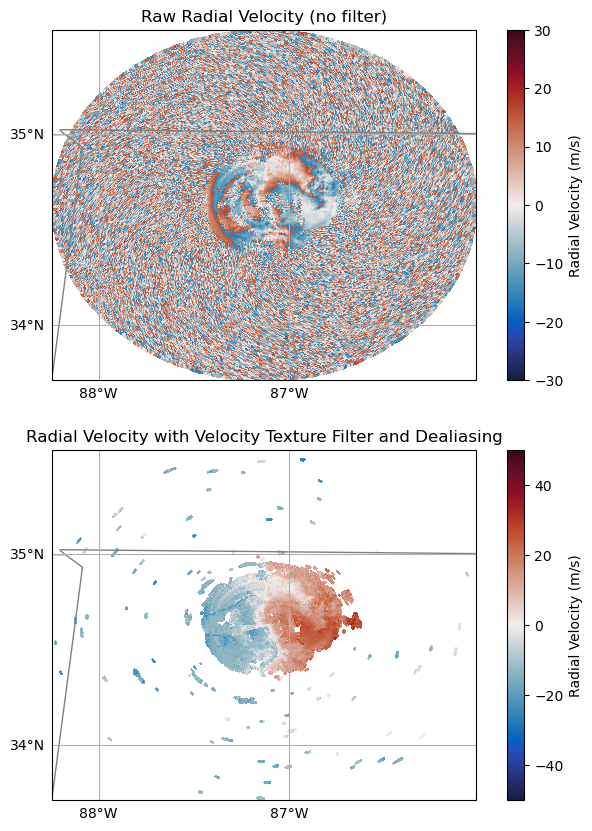
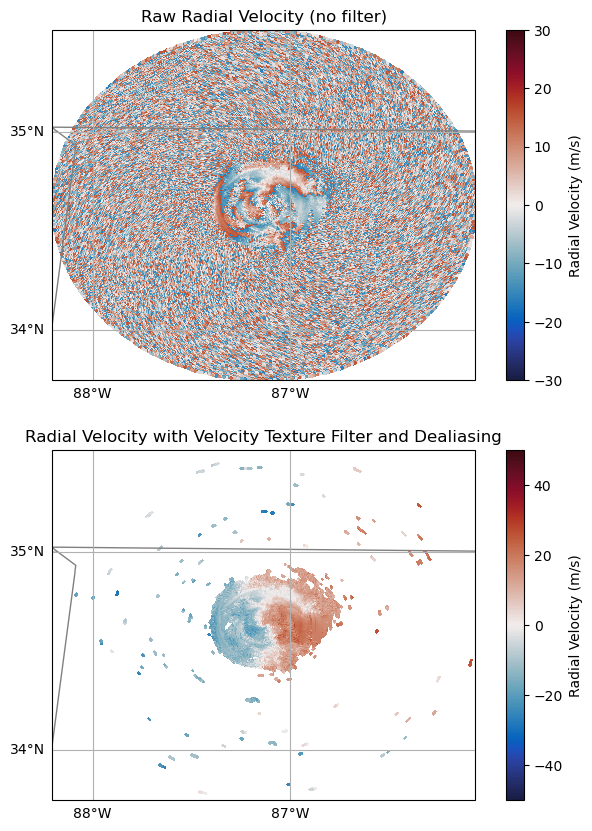
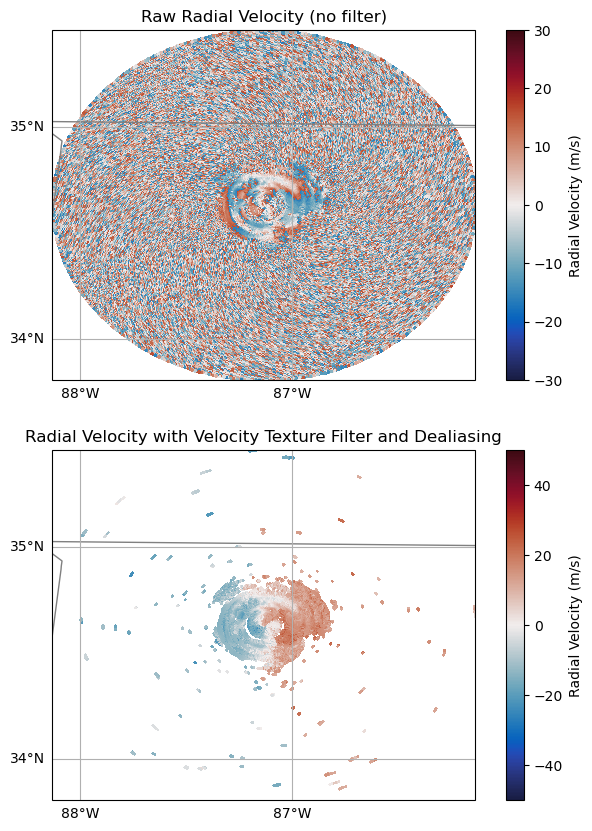
display.plot_ppi_map('mean_doppler_velocity',
title='Raw Radial Velocity (no filter)',
ax=ax,
sweep=sweep,
resolution='50m',
vmin=-30,
vmax=30,
projection=ccrs.PlateCarree(),
colorbar_label='Radial Velocity (m/s)',
cmap='balance')
ax2 = plt.subplot(2,1,2,projection=ccrs.PlateCarree())
# Plot our filtered, dealiased data
display = pyart.graph.RadarMapDisplay(radar)
display.plot_ppi_map('corrected_velocity',
title='Radial Velocity with Velocity Texture Filter and Dealiasing',
ax=ax2,
sweep=sweep,
resolution='50m',
vmin=-50,
vmax=50,
projection=ccrs.PlateCarree(),
gatefilter=gatefilter,
colorbar_label='Radial Velocity (m/s)',
cmap='balance')
plt.show()
plt.close()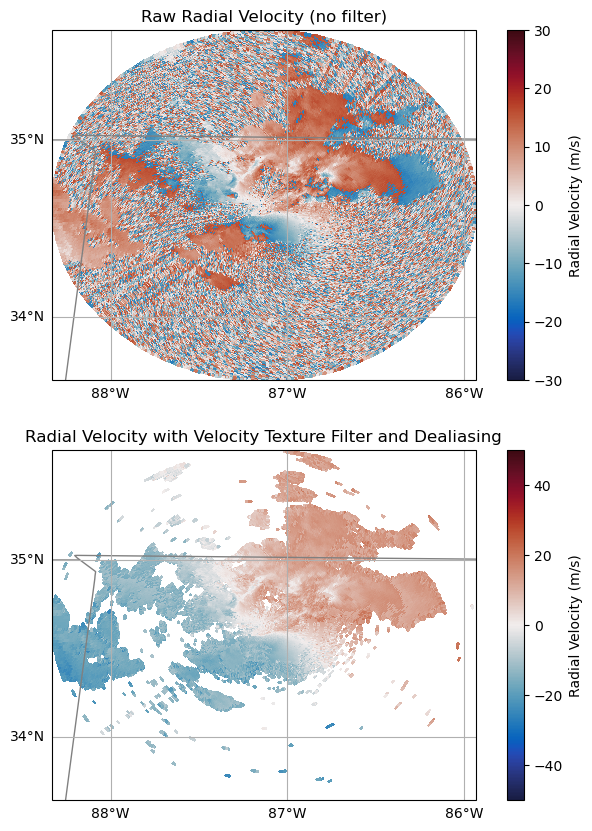
z_grid_limits = (0.,15_000.)
y_grid_limits = (-50_000.,50_000.)
x_grid_limits = (-50_000.,50_000.)
grid_resolution = 500
def compute_number_of_points(extent, resolution):
return int((extent[1] - extent[0])/resolution)
z_grid_points = compute_number_of_points(z_grid_limits, grid_resolution)
z_grid_points
x_grid_points = compute_number_of_points(x_grid_limits, grid_resolution)
y_grid_points = compute_number_of_points(y_grid_limits, grid_resolution)
print(z_grid_points,
y_grid_points,
x_grid_points)
grid = pyart.map.grid_from_radars([radar],
grid_shape=(z_grid_points,
y_grid_points,
x_grid_points),
grid_limits=(z_grid_limits,
y_grid_limits,
x_grid_limits),
roi_func='constant',
roi=500,
)
grid30 200 200
<pyart.core.grid.Grid at 0x347f20f90>display = pyart.graph.GridMapDisplay(grid)
display.plot_grid('corrected_velocity',
level=4,
cmap='balance')
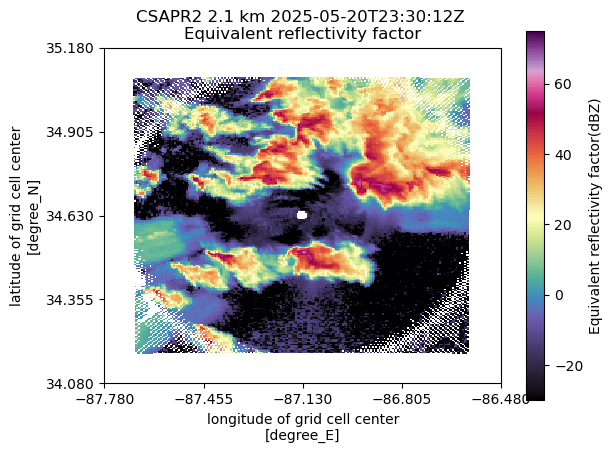
display = pyart.graph.GridMapDisplay(grid)
display.plot_grid('reflectivity',
level=4,
cmap='ChaseSpectral')